Die Renaturierung der Flusslandschaft Emscher im Ruhrgebiet ist eines der größten Infrastrukturprojekte Europas. Hier ist das modernste Abwassersystem der Welt entstanden. Kernstück ist der Abwasserkanal Emscher: Er verläuft auf einer Länge von 51 Kilometern zwischen Dortmund und Dinslaken und wird die Abwässer von rund 2,26 Millionen Einwohnern sowie Industrie und Gewerbe aufnehmen.
Mit allen angeschlossenen Nebenläufen zählt das Einzugsgebiet des Abwasserkanals Emscher 865 Quadratkilometer. Der zentrale Hauptsammler des Kanalnetzes hat einen Durchmesser von 1,6 bis 2,8 Metern, eine Tiefenlage von 8 bis 40 Metern.
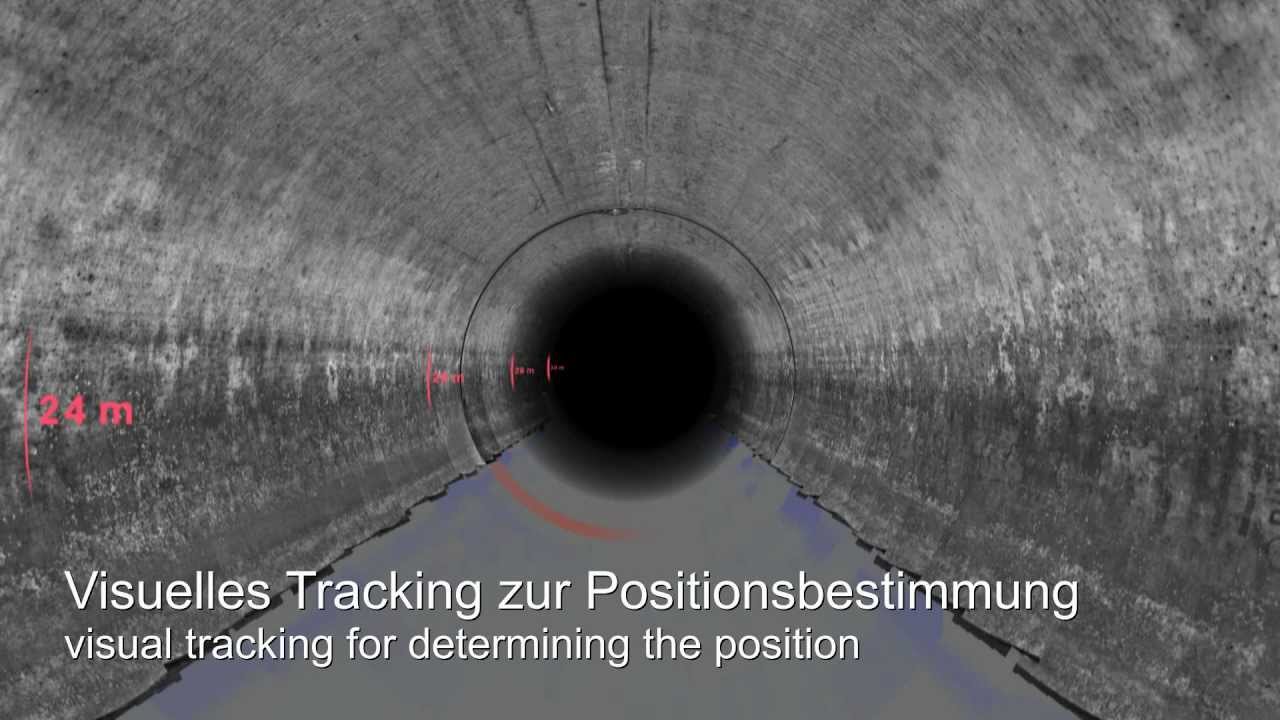
Gemeinsam mit der Emschergenossenschaft hat das Robotik-Team des Fraunhofer IFF eine Systemlösung aus drei Robotern für die Kanalinspektion und -wartung entwickelt. Mit ihnen kann der Abwasserkanal im laufenden Betrieb inspiziert werden – ohne dass ein Mensch ihn betreten muss und ohne dass der Kanal wie sonst üblich außer Betrieb genommen werden muss.