Ziel des im Jahr 2009 beendeten Projektes war die Entwicklung neuartiger Technologien zur vollständigen Zustandserfassung der Rotorblätter von Windenergieanlagen. Durch den Einsatz von modernen Prüfverfahren wie Thermographie, Ultraschall und hochauflösender Kameras in Verbindung mit innovativen Robotern wird eine zuverlässige, objektive und ganzheitliche Analyse des Blattzustandes ermöglicht. Die Rotorblätter von Windenergieanlagen müssen in regelmäßigen Abständen auf Schäden hin untersucht werden. Die hauptsächlich aus glasfaserverstärktem Kunststoff hergestellten Rotorblätter gehören zu den am höchsten beanspruchten Bauteilen einer Windenergieanlage.
Automatisierte Inspektion der Rotorblätter von Windenergieanlagen (Projekt RIWEA)
Datenschutz und Datenverarbeitung
Wir setzen zum Einbinden von Videos den Anbieter YouTube ein. Wie die meisten Websites verwendet YouTube Cookies, um Informationen über die Besucher ihrer Internetseite zu sammeln. Wenn Sie das Video starten, könnte dies Datenverarbeitungsvorgänge auslösen. Darauf haben wir keinen Einfluss. Weitere Informationen über Datenschutz bei YouTube finden Sie in deren Datenschutzerklärung unter: https://policies.google.com/privacySimulation der Inspektion von Rotorblättern im Rahmen des Projekts RIWEA.
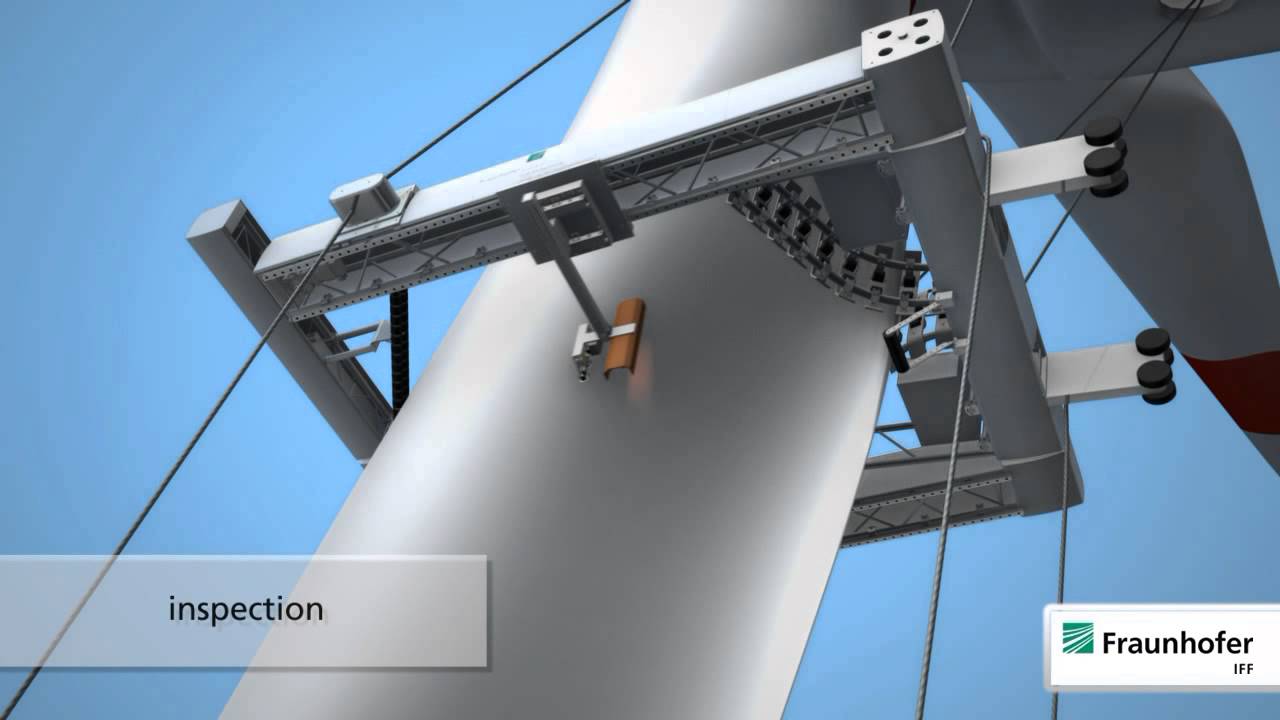
Das Robotersystem besteht aus einer Rahmenstruktur, die das Rotorblatt vollständig umschließt und sich an Seilen entlang des Rotorblattes bewegt. So kann der Roboter alle signifikanten Bereiche des Rotorblattes untersuchen und sich selbstständig dem variablen Querschnitt des Rotorblattes anpassen. Die Rahmenstruktur lässt sich mechanisch öffnen, damit der Roboter automatisch am Rotorblatt angesetzt werden kann. So ist das System kompatibel mit allen Typen von Windenergieanlagen.

Entwicklungsschwerpunkte
- Inspektionssystem zur Prüfung der Rotorblätter von außen
- Einsatz zerstörungsfreier Prüfverfahren wie aktive Infrarot-Thermographie bzw. Ultraschall für tiefer liegende Strukturen (z. B. Holm-, Nasen-, bzw. Endkantenverklebungen)
- visuelle Oberflächenprüfung mit hochauflösenden Kameras
- automatisiertes Trägersystem zur Positionierung und Führung der Prüfsensorik entlang der Rotorblattfläche
- optimierte Energieversorgung und Sicherheitstechnik für den Einsatz an Rotorblättern
- komplettes Zustandsprotokoll des Rotorblattes mit exakter Wiedergabe der detektierten Schäden der jeweiligen Position in einem der Blattkontur angepassten Koordinatensystem sowie deren Ausdehnung
Die im Rahmen des Projektes entwickelten Systeme können auch für weitere Einsatzfelder verwertet werden. Die Robotertechnik kann zur Bewegung an schwer zugänglichen Objekten wie z.B. an Masten und Schornsteinen eingesetzt werden, die Sensorsysteme beispielsweise zur Qualitätsüberprüfung der Rotorblätter direkt nach der Herstellung und zur Untersuchung von Faserverbundbauteilen der Luft- und Raumfahrttechnik.
Projektinfo
Projekttitel
RIWEA – Roboter zur Inspektion der Rotorblätter von Windenergieanlagen